在过去的几十年里,智能柔性电子领域取得了重大进展,应用于人机交互、可穿戴设备、电子皮肤和软机器人等领域。一般来说,传感器的工作模式可以分为接触传感和非接触传感。接触模式下的触觉传感器依赖于来自物体的直接刺激。而非接触式传感器能够利用电磁场和温度变化等信号避免物体接触实现检测。然而到目前为止,同时实现接触-非接触传感,通常至少需要两种或两种类型以上的电子元件集成,这大大增加了传感器的制备和操作复杂性。同时目前报道的器件在接触模式(通常< 1MPa-1)的灵敏度上有很大的妥协,以实现引人注目的非接触性能。因此,开发一种具有优异性能、高集成度的接触-非接触双模式柔性传感器仍然还存在诸多的挑战。
针对上述发展现状,温州大学王舜、陈亦皇教授团队设计了一种聚合物/液态金属有机/无机复合材料,提出了一种简单而稳健的策略来制造具有双模式响应、高透气性、高灵敏度、优越机械稳定性、优良导电性和可回收的柔性瞬态电路。该电路具有高分辨率(100 μm)和优越的导电性(2.5×105S/m),在常规变形时表现出优越的导电性和优异的机械耐久性(10000次)。所制备的传感器具有1.24 kPa-1的高触觉灵敏度,同时具有出色的非接触传感性能,这是目前报道的先进双模式系统(通常< 1MPa-1)所无法达到的。为了说明其实用潜力,证实了其在接触模式下的信息传输、位置验证和压力可视化能力,以及非接触模式下的空间(如方向、距离和角度)和材料(如数量、成分和运动)识别。
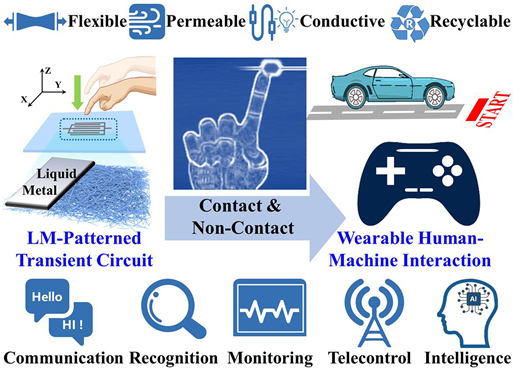
柔性、透气和可回收的聚合物/液态金属基(非)接触双模式瞬态电路用于可穿戴人机交互
【文章要点】
1.提出了一种基于叉指电极图案的双模式传感电子皮肤(FICES),具有高分辨率(100m)、优越的导电性(2.5×105 S/m)、优异的机械耐久性(10000次)、出色的响应时间(< 100 ms)、高透气性及高灵敏度(1.24 kPa-1)。
2.系统地研究了柔性电路的电阻、焦耳加热、压力感应以及空间遥感性能,并表现出优异的性能,可以实现阵列传感、摩斯密码交互、物体识别、水位检测等多功能的应用场景。
3.通过单片机系统实现遥控蓝牙小车、压力报警传感、玩贪吃蛇游戏等人机交互应用。该柔性电路具有高回收率(92%)
相关研究以“Flexible, permeable and recyclable liquid-metal-based transient circuit enables contact/non-contact sensing for wearable human-machine interaction”为题发表在国际期刊《Small Methods》(IF=15.367)上,温州大学作为唯一通讯单位,我院2020级硕士研究生郑凯为第一作者,我院陈亦皇教授、潘霜副教授、王舜教授为本文通讯作者。该工作得到张礼杰、陈锡安、金辉乐等老师的协助,并受到国家自然科学基金(No.62104170和22109120)、浙江省自然科学基金(LQ21B030002和LY23F04000)与浙江省高层次人才专项支持计划(2019R52042)等项目的支持。
【文章链接】10.1002/smtd.202201534
 常用链接
常用链接
 科研概况
科研概况  科研论文
科研论文